
 Иновације су један од најважнијих елемената привреде засноване на знању. Креативни и иновативни потенцијал којим располаже Машински факултет у Београду био је и остао један је од најзначајнијих научних ресурса којима се може значајно оживети привреда Србије, подићи њена конкурентност и обезбедити економски раст земље. Покретна платформа за реалистичне симулаторе лета и вожње коју развија проф. др Драган Милутиновић са сарадницима, само је један у низу пројеката на којима раде истраживачи у Лабораторији за индустријску роботику и вештачку интелигенцију на МФ.
Иновације су један од најважнијих елемената привреде засноване на знању. Креативни и иновативни потенцијал којим располаже Машински факултет у Београду био је и остао један је од најзначајнијих научних ресурса којима се може значајно оживети привреда Србије, подићи њена конкурентност и обезбедити економски раст земље. Покретна платформа за реалистичне симулаторе лета и вожње коју развија проф. др Драган Милутиновић са сарадницима, само је један у низу пројеката на којима раде истраживачи у Лабораторији за индустријску роботику и вештачку интелигенцију на МФ.
Платформа је намењена за израду различитих симулатора од лета авиона, преко вожње оклопних транспортера до руковања грађевинским машинама и представља последњу реч технике у овој области, изјавио је за сајт МФ проф. Милутиновић, који је и руководилац лабораторијом.
Моделирање оваквих платформи, за које су заинтересовани и домаћи и инострани произвођачи, резултат је 20-годишњег рада у области машина са паралелном кинематиком (робота, машини алатки и симулатора). Један од најважнијих резултата тих истраживања јесте развијена метода моделирања механизама са паралелном кинематиком на бази минималног броја параметара.
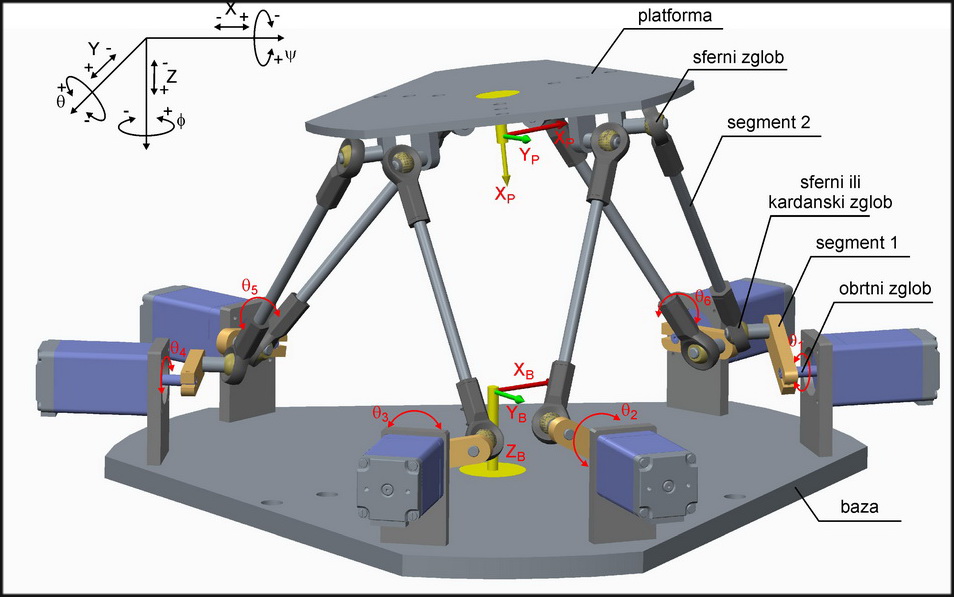
То нам је у протекле две године омогућило да развијемо комплетно моделирање платформе на бази паралелног механизма са 6 степени слободе и оснаженим обртним зглобовима као основе за развој реалистичних симулатора лета и вожње, истакао је проф. Милутиновић.
 Реалистични симулатори су веома сложени мехатронски системи који, према речима нашег саговорника, поред визуелног модула подразумевају и покретну платформу са управљањем које укључује хаптички модул (Washout алгоритме) тако да је обухваћена перцепција кинематичких и динамичких ефеката. У том смислу, моделирање покретне платформе које је развијено на Машинском факултету елиминише некомплетност и неефикасност постојећих метода моделирања.
Реалистични симулатори су веома сложени мехатронски системи који, према речима нашег саговорника, поред визуелног модула подразумевају и покретну платформу са управљањем које укључује хаптички модул (Washout алгоритме) тако да је обухваћена перцепција кинематичких и динамичких ефеката. У том смислу, моделирање покретне платформе које је развијено на Машинском факултету елиминише некомплетност и неефикасност постојећих метода моделирања.
Основу за пројектовање платрофме и развој управљања чине изузетно сложени модели који се односе на кинематику, статику и динамику. С тим у вези, додао је проф. Милутиновић, посебно је важно нагласити да они омогућавају рад симулатора у реалном времену.
Развој реалистичног симулатора као сложеног мехатронског система представља мултидициплинарни и интердисциплинарни проблем који подразумева врхунска знања из области машинства, електротехнике и софтверског инжењерства. На развоју модела, професор Милутиновић је радио сам пуне две године, а затим је заједно са сарадницима неколико месеци радио детаљне рачунарске симулације.
То је дало добре резултате, што је наметнуло и потребу експерименталне провере модела кроз развој и израду desktop прототипа покретне платформе. Прототип је развијен и комплетно израђен на Катедри за производно машинство, а у истраживачком тиму који је радио на прототипу поред проф. Милутиновића су и проф. др Саша Живановић, доц. др Никола Славковић, доц. др Бранко Кокотовић и др Зоран Димић из “Лола” Института. Даља истраживања могла би да обухвате анализу и оптимизацију пројектних параметара као основе за пројектовање и градњу оваквих платформи, а то у великој мери зависи од захтева потенцијалног произвођача, рекао је проф. Милутиновић.
[su_youtube url=“https://www.youtube.com/watch?v=W0PTuGc4bEM“ width=“320″ height=“220″]
Покретањем платформе се примера ради, може симулирати лет односно управљање кретања авиона у одређеном окружењу уз одговарајућу динамику (брзина, убрзање, путања и услови лета и др.). То према речима, нашег саговорника, значи да ће се платформа кретати онако како се лет одвија, при ћему ће пилот имати потпуни доживљај као да се налази у кокпиту авиона.
Занимљиво је да је основа платформе за симулаторе лета био развој домаћег робота DELTA концепције као једне од најбржих у свету. Роботи ове концепције омогућавају веома кратка циклусна времена тако да се на пример, за само 60 секунди може веома прецизно извршити и до 120 манипулационих циклуса.
(Извор: Машински факултет)